- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

ເປີດເຜີຍ Excavator Hydraulic Pump, Main Control Valve, ມໍເຕີເດີນທາງ!
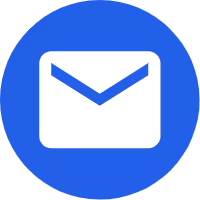
ເຄື່ອງຂຸດເຈາະແມ່ນຂັບເຄື່ອນໂດຍເຄື່ອງຈັກເພື່ອຂັບປັ໊ມໄຮໂດຼລິກໃຫ້ຫມຸນ. ຫຼັງຈາກນ້ໍາມັນໄຮໂດຼລິກຄວາມກົດດັນສູງອອກມາຈາກປັ໊ມໄຮໂດຼລິກ, ມັນຂັບລົດມໍເຕີໄຮໂດຼລິກ, ກະບອກໄຮໂດຼລິກ, ມໍເຕີ swing ແລະວາວການແຈກຢາຍເພື່ອປະຕິບັດລະບົບສາຍສົ່ງແລະຄວບຄຸມໄຮໂດຼລິກ.
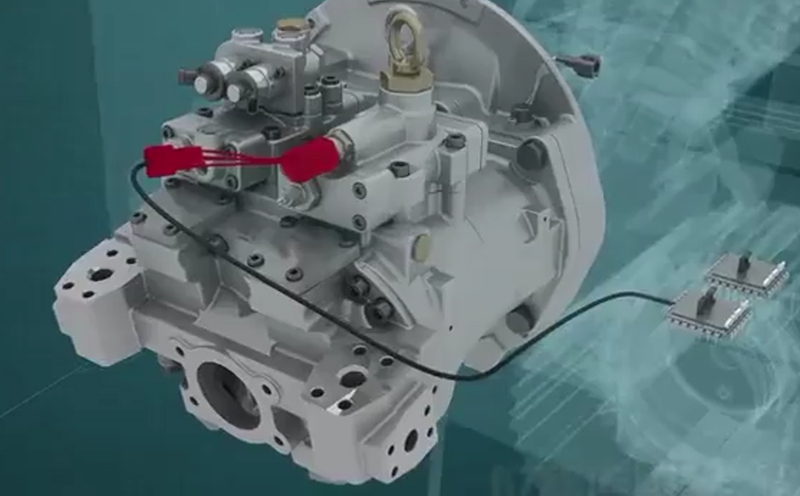
ລະບົບໄຮໂດຼລິກຂອງ excavator (ບາງສ່ວນ)
ປັ໊ມໄຮໂດຼລິກ
ການຕິດຕັ້ງ, ມີສອງວິທີການ tandem ແລະຂະຫນານ. ຊຸດປັ໊ມຂະຫນານແມ່ນປັ໊ມ piston axial, ຄວາມແຕກຕ່າງຕົ້ນຕໍແມ່ນໂຄງສ້າງຂອງຮູບແບບທີ່ແຕກຕ່າງກັນ.
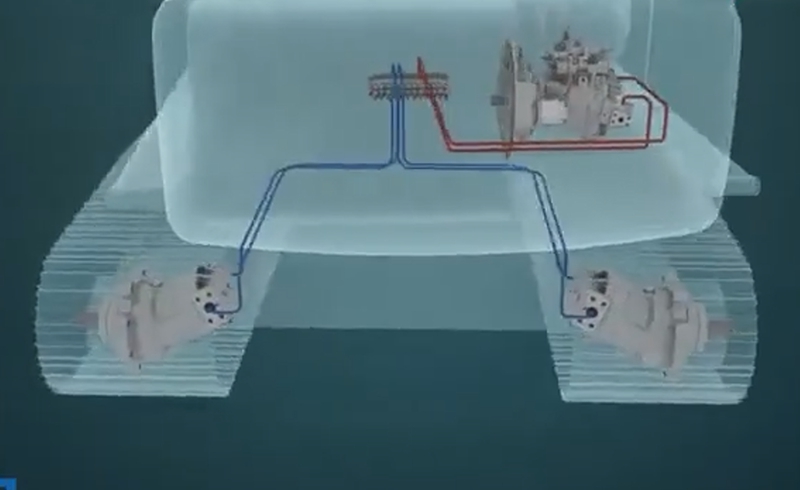
ຊຸດປັ໊ມ
ປັ໊ມຊຸດ, ເຊິ່ງເອີ້ນກັນວ່າປັ໊ມກ່ອນແລະຫຼັງຈາກປັ໊ມ plunger ແຜ່ນ swash, ໂດຍການຄວບຄຸມຕົວແປການປ່ຽນແປງຂອງແຜ່ນ swash, ປັ໊ມຊຸດແມ່ນຕົວແທນຄລາສສິກຂອງ Kawasaki K3V112.
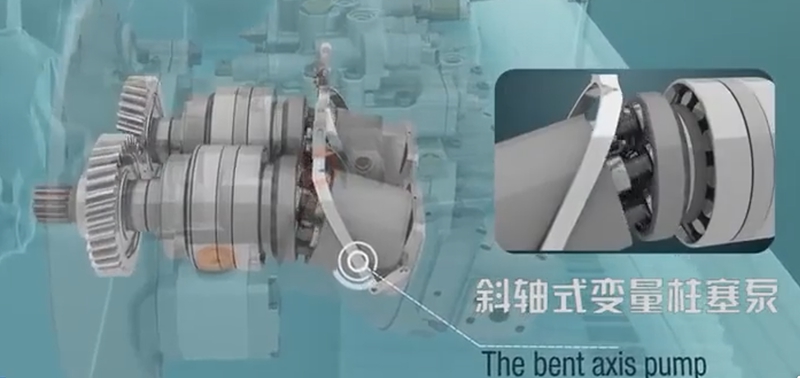
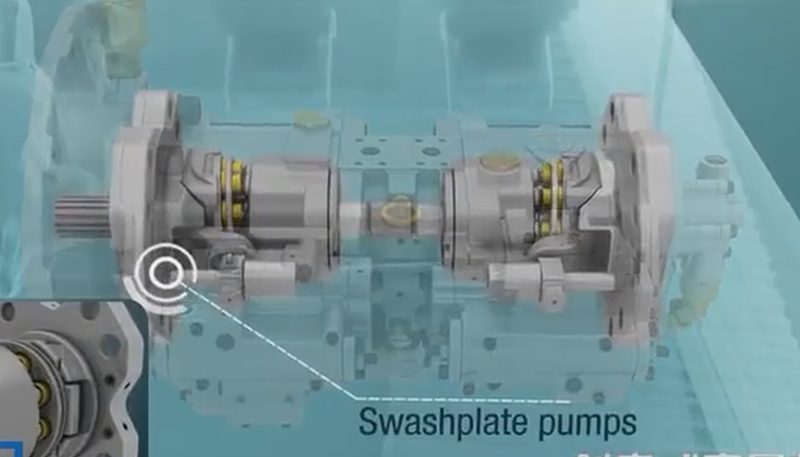
ປັ໊ມຂະຫນານ
ປັ໊ມຂະຫນານ, ສ່ວນຫຼາຍແມ່ນປັ໊ມ piston oblique, ໂດຍການປ່ຽນແປງມຸມຂອງບລັອກກະບອກເພື່ອບັນລຸຈຸດປະສົງຂອງຕົວແປ. Hitachi ZX200-3 ແລະ Hitachi ZX200-3G ໃຊ້ປັ໊ມຂະຫນານ, ປັ໊ມຂະຫນານແມ່ນເປັນຕົວແທນໂດຍປັ໊ມ Hitachi HPV.
ມັນເປັນທີ່ຮູ້ຈັກວ່າປັ໊ມແລະມໍເຕີແມ່ນປີ້ນກັບກັນ, ດັ່ງນັ້ນມໍເຕີໄຮໂດຼລິກຍັງແບ່ງອອກເປັນປະເພດ swash shaft ແລະ swash ປະເພດ.
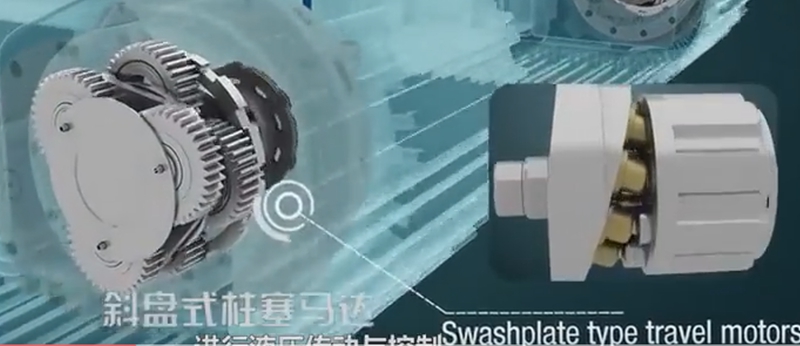
ແຜ່ນ Swash ຂອງມໍເຕີ
ມໍເຕີແຜ່ນ Swash: ເສັ້ນສູນກາງຂອງກະບອກສູບແມ່ນກົງກັນກັບ shaft ຂັບ, ແລະ plunger ໄດ້ຖືກ pushed ໂດຍແຜ່ນ swash ເພື່ອຍ້າຍຊ້ໍາກັນເປັນເສັ້ນຊື່.
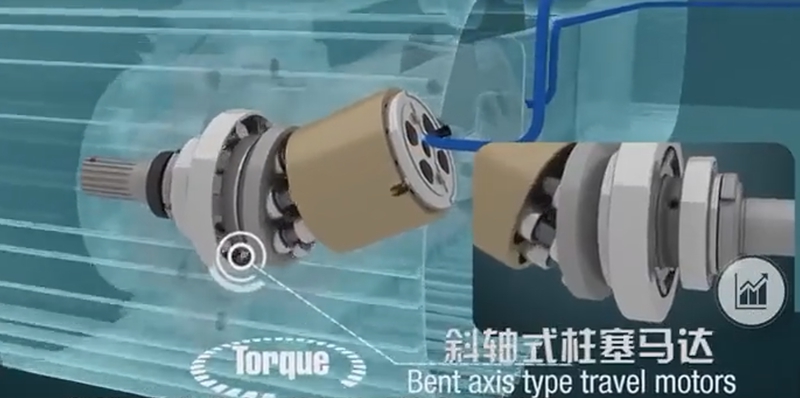
ມໍເຕີ shaft oblique
ມໍເຕີ shaft oblique: ເສັ້ນສູນກາງຂອງ cylinder block ຕັດກັບ shaft ຂັບ.
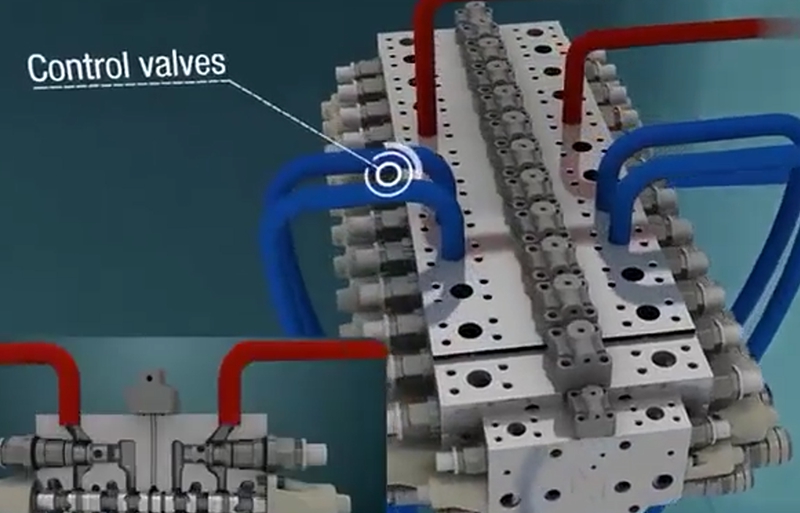
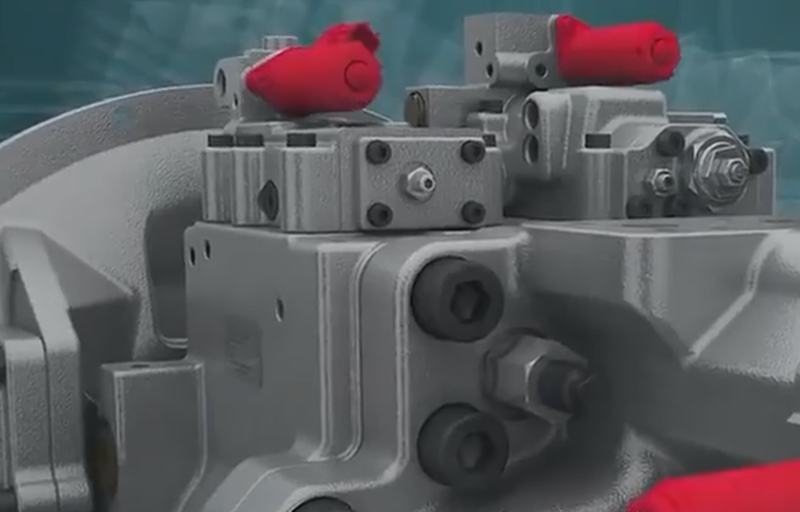
ປ່ຽງປະສົມປະສານ
ປ່ຽງຄວບຄຸມຍັງເອີ້ນວ່າວາວປະສົມປະສານ, ນ້ໍາມັນໄຮໂດຼລິກຄວາມກົດດັນສູງຈາກປັ໊ມໄຮໂດຼລິກເຂົ້າໄປໃນປ່ຽງປະສົມປະສານ, ຈາກປ່ຽງປະສົມປະສານອອກໄປໃນກະບອກໄຮໂດຼລິກ, ມໍເຕີຍ່າງ, ມໍເຕີ rotary ແລະເຄື່ອງກະຕຸ້ນໄຮໂດຼລິກອື່ນໆເພື່ອໃຫ້ສໍາເລັດການປະຕິບັດ.
ຕໍ່ໄປ, ພວກເຮົາສົນທະນາກ່ຽວກັບວາວແມ່ເຫຼັກໄຟຟ້າແລະເຊັນເຊີບາງຢ່າງກ່ຽວກັບລະບົບໄຮໂດຼລິກຂອງເຄື່ອງຂຸດ
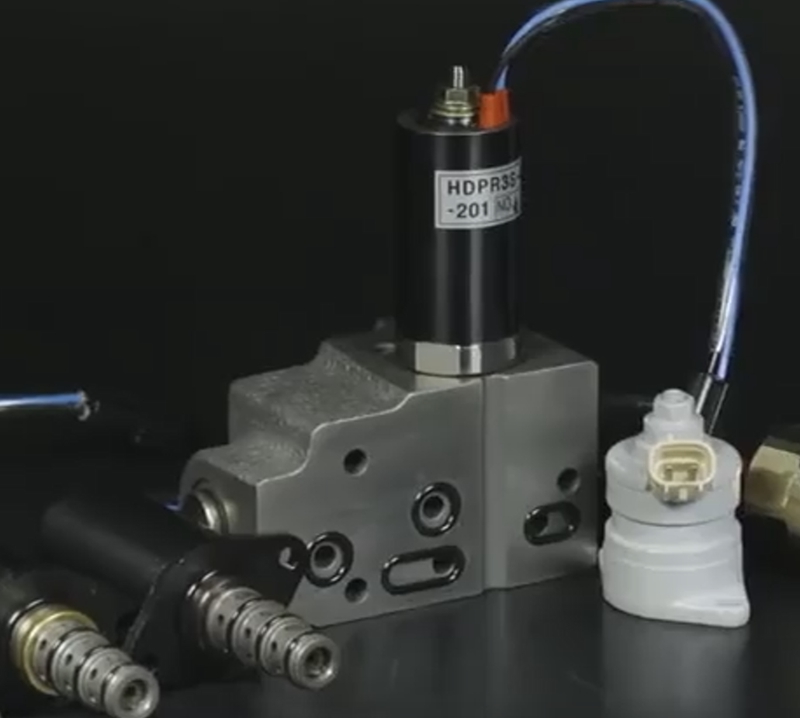
ເຊັນເຊີທົ່ວໄປ, ປ່ຽງ solenoid
ນີ້ແມ່ນທົ່ວໄປ: ປ່ຽງ solenoid ອັດຕາສ່ວນ, ເຊັນເຊີຄວາມກົດດັນ, ເຊັນເຊີຄວາມໄວ, ເຊັນເຊີການຍ້າຍມຸມ, ເຊັນເຊີການຍ້າຍແລະອື່ນໆ.
ປ່ຽງ solenoid ອັດຕາສ່ວນ
ປ່ຽງ solenoid ອັດຕາສ່ວນ: ໃນຄວາມໄວໃດກໍ່ຕາມເພື່ອໃຫ້ພະລັງງານປັ໊ມໄຮໂດຼລິກແລະຄວາມໄວຂອງເຄື່ອງຈັກ (ພະລັງງານ) ສອດຄ່ອງໂດຍພື້ນຖານ.
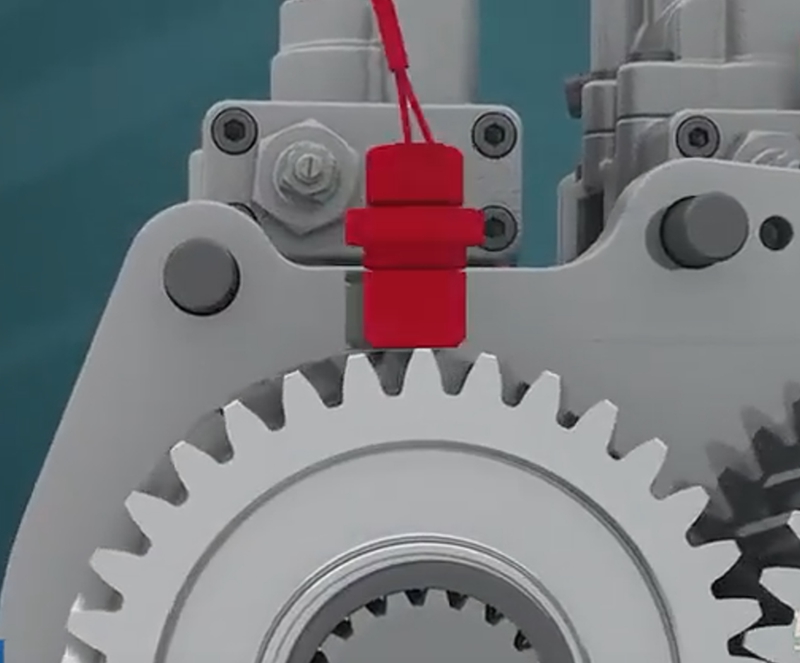
ເຊັນເຊີຄວາມໄວ
ເຊັນເຊີຄວາມໄວ: ຕິດຕັ້ງຢູ່ໃນເຄື່ອງຈັກແລະການເຊື່ອມໂຍງປັ໊ມໄຮໂດຼລິກ, ສ່ວນໃຫຍ່ແມ່ນເກັບກໍາຂໍ້ມູນຄວາມໄວກັບຄອມພິວເຕີ້ເພື່ອໃຫ້ກົງກັບເຄື່ອງຈັກແລະຄວາມໄວ.
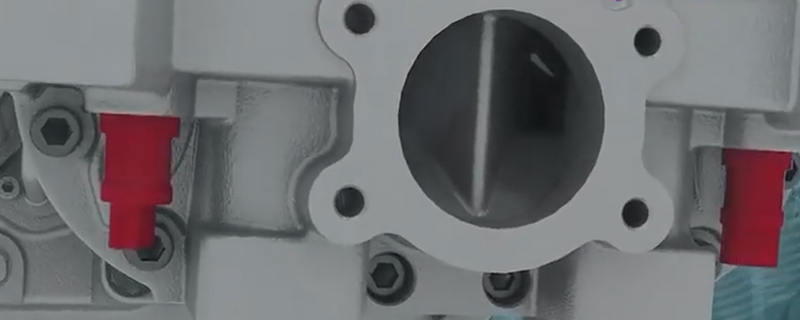
ເຄື່ອງປ່ຽນຄວາມກົດດັນ
ເຊັນເຊີຄວາມກົດດັນ: ກວດພົບຄວາມກົດດັນທາງເຂົ້າແລະຮູຂອງປັ໊ມໄຮໂດຼລິກ, ສົ່ງມັນໄປຫາຄອມພິວເຕີ້ເພື່ອວິເຄາະແລະຄວາມຄິດເຫັນກັບພາກສ່ວນອື່ນໆ, ເຊັ່ນ: ໂຫມດບໍ່ເຮັດວຽກຂອງເຄື່ອງຂຸດ.
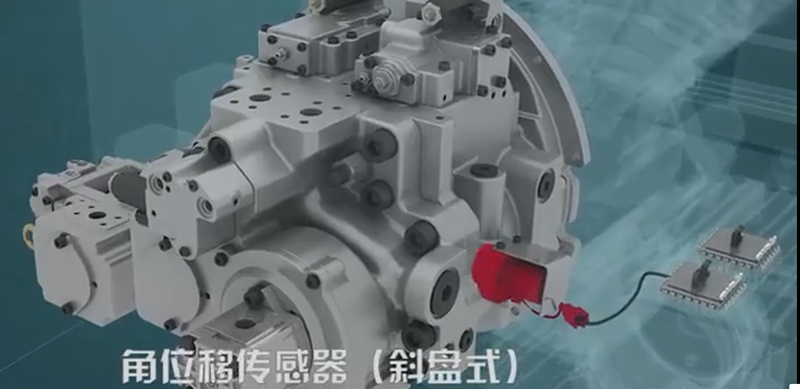
ເຊັນເຊີ RVDT
ເຊັນເຊີ RVDT, ເຊິ່ງເອີ້ນກັນວ່າເຊັນເຊີການຍ້າຍມຸມ, ປັ໊ມໄຮໂດຼລິກແຜ່ນ swash, ໂດຍການປ່ຽນແປງມຸມ inclined ຂອງແຜ່ນ swash ເພື່ອປ່ຽນການໄຫຼຂອງປັ໊ມ, ດັ່ງນັ້ນເຊັນເຊີການຍ້າຍມຸມຖືກໃຊ້ເພື່ອເກັບກໍາຂໍ້ມູນການຍ້າຍມຸມຂອງແຜ່ນ swash ແລະ. ສົ່ງໄປທີ່ຄອມພິວເຕີເພື່ອຄວບຄຸມ.
ເຊັນເຊີການຍ້າຍ LVDT
LVDT displacement sensor: displacement sensor, inclined axis ສູບບົບໄຮໂດຼລິກໂດຍການປ່ຽນຕໍາແຫນ່ງກະບອກເພື່ອປ່ຽນການໄຫຼ, ດັ່ງນັ້ນ sensor ການຍ້າຍເພື່ອເກັບກໍາຂໍ້ມູນ, ກັບຄອມພິວເຕີສໍາລັບການຄວບຄຸມ.
www.swaflyengine.com